Une grosse caisse d’aluminium avance en tremblotant, roulant sur trois roues. Le moteur de camion fait vibrer la machine mais celle-ci ne commet aucune erreur de position. Nous sommes en Espagne, en 1981, et DISAM-0 est le premier robot conçu par le laboratoire madrilène Robotics Lab, de l’Université Carlos III.
Les années qui suivent sont celles de l’entrée du pays dans l’Europe. Et le laboratoire n’est pas en reste : les collaborations et les projets se multiplient.
Les chercheurs de Robotics Lab conçoivent un système d’inspection des éléments en fibre de carbone pour EADS, des systèmes de perception et de navigation (projet PANORAMA), des projets de robots mobiles pour la sécurité publique (projet AMR), un robot d’asemblage pour les chaînes de montage (ROCCO).
Le laboratoire travaille également à la conception de systèmes pour des applications pratiques : FMS/2, système flexible de fabrication, COCO, un système multirobots coordonné, des bras robotisés avec retour de force.
Les projets européens se sont enchaînés dans les années 90 : CEROS (coût du système de contrôle du robot), le projet INTAS Dyros (Simulation dynamique d’un robot en 3D pour l’assemblage de structures dans l’espace) et les projets Brite-Euram PSYCHO (Systèmes pour l’identification et le contrôle des procédés utilisant fortement des réseaux de neurones).
Ce sont tous ces travaux qui ont forgé l’excellence de ce laboratoire.
Il a aujourd’hui un rôle majeur dans la conception de robots manipulateur.
MANFRED-2 (MAN FriENly mobile manipulator) est un robot mobile manipulateur dont le but est de servir de plate-forme expérimentale pour la recherche. Il a été conçu pour fonctionner dans des environnements où les capacités de manipulation sont nécessaires. MANFRED-2 doit être en mesure de naviguer de manière autonome dans un environnement composé de couloirs et de bureaux. La conception du robot est inspiré par les rovers planétaires : il est composé d’une base mobile sur laquelle des instruments peuvent être ajoutés, dont des bras. MANFRED ouvre les portes, évite les obstacles, ramasse et manipule des objets.

ASIBOT est un robot manipulateur de 10 kg pour 1,3 m. Tout le système de commande du robot est embarqué. Il est conçu pour une tâche d’assistance aux personnes âgées ou handicapées. Chaque bras possède trois doigts pour manipuler différents objets. Les applications qui ont été testées dans des conditions réelles sont : l’asitance pour manger, boire, se raser, se maquiller, se brosser les dents, etc. Le robot est en cours de test à l’hôpital national pour tétraplégiques à Tolede. Le bras est contrôlable par joystick, par pavé tactile ou par la voix.

Maggie est un robot drôle et intelligent né en 2005, fruit de deux années de travail. Il mesure 1,4 m et peut bouger son corps, ses bras, sa tête et les yeux, parler et reconnaître la voix. Il a de nombreux capteurs, dont des capteurs tactiles. Il est donc posible de communiquer avec lui en parlant, en utilisant des gestes et aussi en le touchant. Il est doté d’un écran tactile sur la poitrine. C’est un robot personnel. Maggie est utilisée en tant que plate-forme de recherche pour l’étude des interactions humain-robot, l’intelligence artificielle et l’autonomie.
Et en ce début de 21e siècle, le laboratoire a su évoluer pour s’engager dans les technologies d’avenir.
Robots humanoïdes
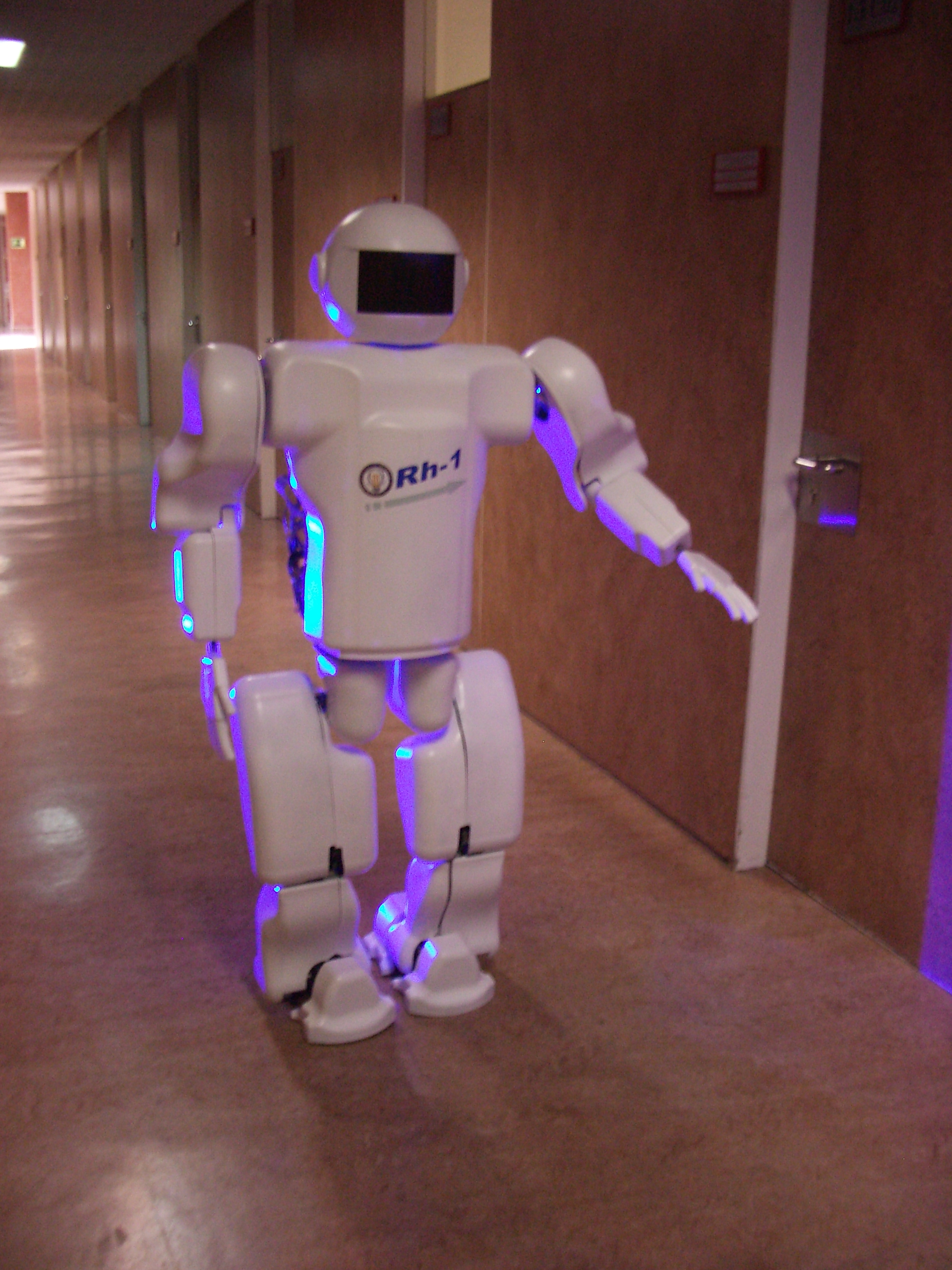
Rh-1 (successeur de Rh-2) est un robot humanoïde autonome de 1,3 m pour 50 kg. Il peut se déplacer à diverses allures, aussi bien en intérieur qu’en extérieur et coopérer avec des humains ou d’autres robots dans des environnements réels. Le robot est équipé de deux processeurs et de deux batteries qui lui offrent 30 minutes d’autonomie. Le système sensoriel du robot est divisé en deux parties, les capteurs de locomotion d’une part (accéléromètres et inclinomètres) et les capteurs d’interaction (caméra et micros) d’une autre.
[…] L’article dans son intégralité est paru dans Planète Robots n°42 du 1er Novembre 2016.