Ces deux domaines s’épanouissent depuis la fin du 20e siècle. Les progrès technologiques leur permettent d’interagir et de s’enrichir mutuellement. Planète Robots, avec l’assistance du Groupe de Recherche en Robotique, vous présente quatre projets de recherche mêlant études de neuroscience ou du comportement, humain ou animal, et robotique.
La richesse de ces recherches vient de l’échange constant entre les deux pôles, celui de la machine et celui du vivant. Progressivement, les chercheurs apprennent et bâtissent leur travail en puisant, alternativement, à l’une ou l’autre des sources.
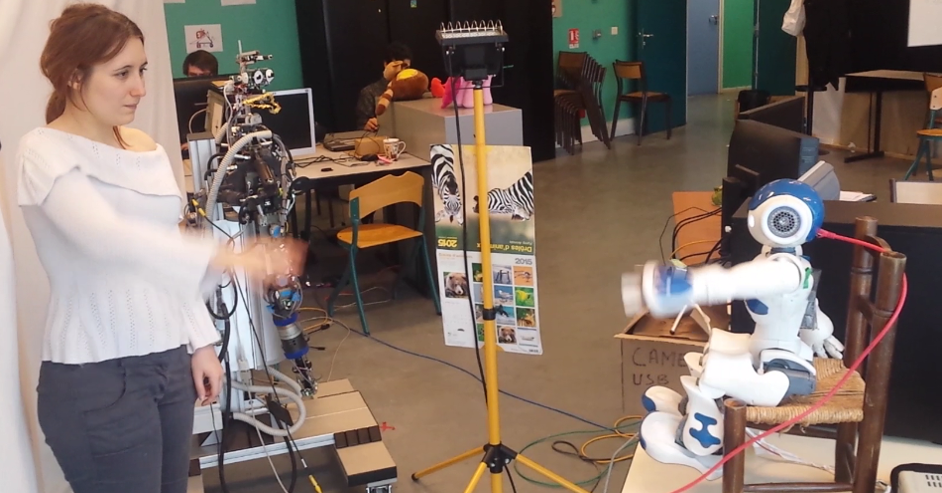
Eva Ansermin, nouvelle doctorante au laboratoire ETIS (Equipes Traitement de l’Information et Systèmes) de l’Université de Cergy Pontoise nous présente ses travaux de master sur la reproduction de gestes par imitation à partir d’un modèle de synchronisation de bas niveau.
Chez l’humain, la synchronisation entre partenaires se fait naturellement : deux personnes marchant l’une à côté de l’autre adoptent rapidement le même pas. Il est donc intéressant de reproduire ce comportement chez la machine pour rendre ses interactions plus naturelles à l’homme.
Pour prévoir l’émergence de ce comportement et le modéliser, la théorie assimile la synchronisation de la machine par rapport à l’humain à celle de deux pendules oscillant entre eux.
Eva a étudié la synchronisation avec un robot Nao. Le modèle utilisé est celui d’un oscillateur comportant deux neurones. C’est via un flux d’images, un flot optique, que l’énergie est apportée à l’oscillateur. Avec ce type d’oscillateur, Nao est capable de reproduire un mouvement simple, dont la séquence de base est préprogrammée, comme un soulèvement et un abaissement des bras.
Les mouvements sont synchronisés, c’est-à-dire, qu’ils sont réalisés à la même fréquence et en correspondance de phases.
Pour introduire un mécanisme de reproduction, il faut aller plus loin et utiliser plusieurs oscillateurs. Dans un premier temps, le mouvement est décomposé, selon ses composantes horizontales et verticales.
L’apprentissage utilise différents oscillateurs (différentes fréquences) pour générer un mouvement rythmique. Des poids sont attribués aux oscillateurs. Le logiciel compare une séquence à reproduire (le geste du partenaire) avec les différents oscillateurs et modifie les poids pour sélectionner les bons oscillateurs. L’effet d’entraînement permet aux oscillateurs de se synchroniser sur les fréquences de la séquence à reproduire.
Plus les mouvements sont complexes, plus ils nécessitent d’oscillateurs. Toutefois, à ce jour, les mouvements reproduits sont encore simples : s’il peut reproduire des gestes plus compliqués que des cercles ou des huits, le robot ne peut apprendre de gestes comportant des angles.
Lors de l’exercice, le robot, d’abord hésitant, parvient peu à peu à synchroniser son mouvement. Si le mouvement de l’humain cesse, le robot perd progressivement sa capacité à effectuer le geste en conservant la fréquence initiale. Les mouvements actuels sont générés par deux moteurs simultanément, mais de façon découplée.
Les chercheurs ont de nombreuses perspectives pour leur projet. Ils souhaitent par exemple utiliser des modèles prédictifs et des modèles non-linéaires ou encore parvenir à générer des mouvements selon plusieurs degrés de liberté.

Franck Ruffier (1), de l’équipe de biorobotique de l’Institut des Sciences du Mouvement Etienne Jules Marey de Marseille propose un modèle sensorimoteur de l’insecte ailé, inspiré par la robotique.
Le principe de ses recherches est de dériver des modèles d’insectes à partir de la robotique pour mieux comprendre le fonctionnement des animaux. Le modèle robotique permet de poser des hypothèses à contrôler ensuite sur l’insecte.
Pour ce faire, il faut construire des capteurs qui soient les plus proches possibles de leur équivalent biologique.
M. Ruffier prend l’exemple de l’œil à facettes de la mouche. Il utilise un capteur comprenant de nombreux photorécepteurs, dont chacun correspond à un détecteur optique gaussien. L’appareil ainsi créé rempli le but déterminé : obtenir une vision très large. Des prototypes simples ont été assemblés avec 6 photodiodes. Le flux optique recueilli par l’appareil est fonction de la vitesse et de la distance.
Le premier œil à facettes artificiel programmable voit alors le jour : c’est Curvace (pour CURVed Artificial Compound Eye : www.curvace.org).
Des algorithmes s’ajoutent à la couche du matériel récepteur pour rendre cohérente les images obtenues. L’un d’entre eux par exemple permet de s’abstraire des problèmes de recouvrement des images issues de deux photorécepteurs.
L’oeil à facettes artificiel a permis de réaliser trois prototypes de système de contrôle de vol, « proof of concept » pour les chercheurs :
– OCTAVE, pour Optical altitude Control sysTem for Autonomous Vehicles : système de suivi de terrain.
– LORA : système de contrôle de la vitesse et de la position.
– BEEROTOR : système de stabilisation.
Chacun de ces systèmes a été mis en application sur un robot volant ou sur un aéroglisseur.
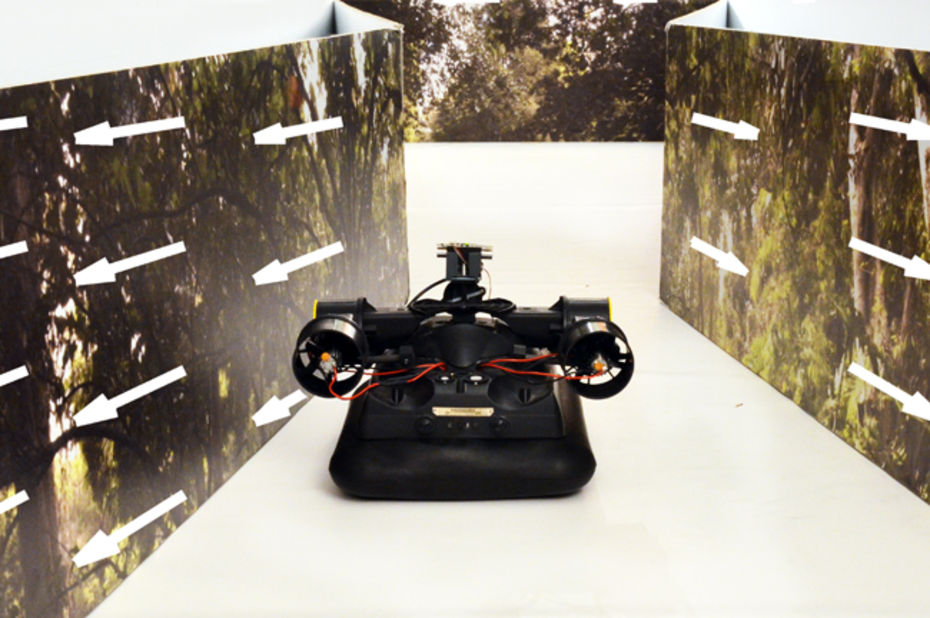
Les chercheurs ont observé l’animal. Une abeille, placée dans un tunnel, ne réagit pas à la distance par rapport aux murs, mais par rapport au flux optique perçu quand elle se déplace. Entre les deux parois, elle aura tendance à rester à une distance égale de l’une et de l’autre.
LORA, robot aéroglisseur, a été conçu pour répliquer ce comportement animal. Il est pourvu de deux contrôles des flux optiques :
– le récepteur de gauche prenant les images de droite,
– et inversement, celui de droite prenant les images de gauche.
Le système interne du robot a pour but de maintenir constant le flux d’images.
Pour cela, la vitesse de vol est contrôlée par le flux optique : quand le flux devient trop important, cela signifie pour le robot qu’il vole à une vitesse excessive. Le logiciel la diminue alors, et procède inversement en cas de flux optique inférieur à la constante poursuivie.
Avec une talle aptitude, la machine peut adapter son comportement à l’environnement. Par exemple, quand il doit traverser un couloir reserré en son centre, LORA freinera à l’arrivée dans le goulet, pour accélérer après.
Les chercheurs comparent en permanence la cohérence des résultats obtenus avec le robot par rapport à ceux observés chez l’insecte. Dans le cas d’une abeille, en cas de vent contraire, l’insecte cherche à maintenir une vitesse constante. La même observation a pu être réalisée avec le robot, placé dans les mêmes conditions. Le logiciel cherche à conserver un flux optique constant et cette simple propriété lui permet d’adapter sa vitesse de vol à celle du vent auquel le robot est confronté.
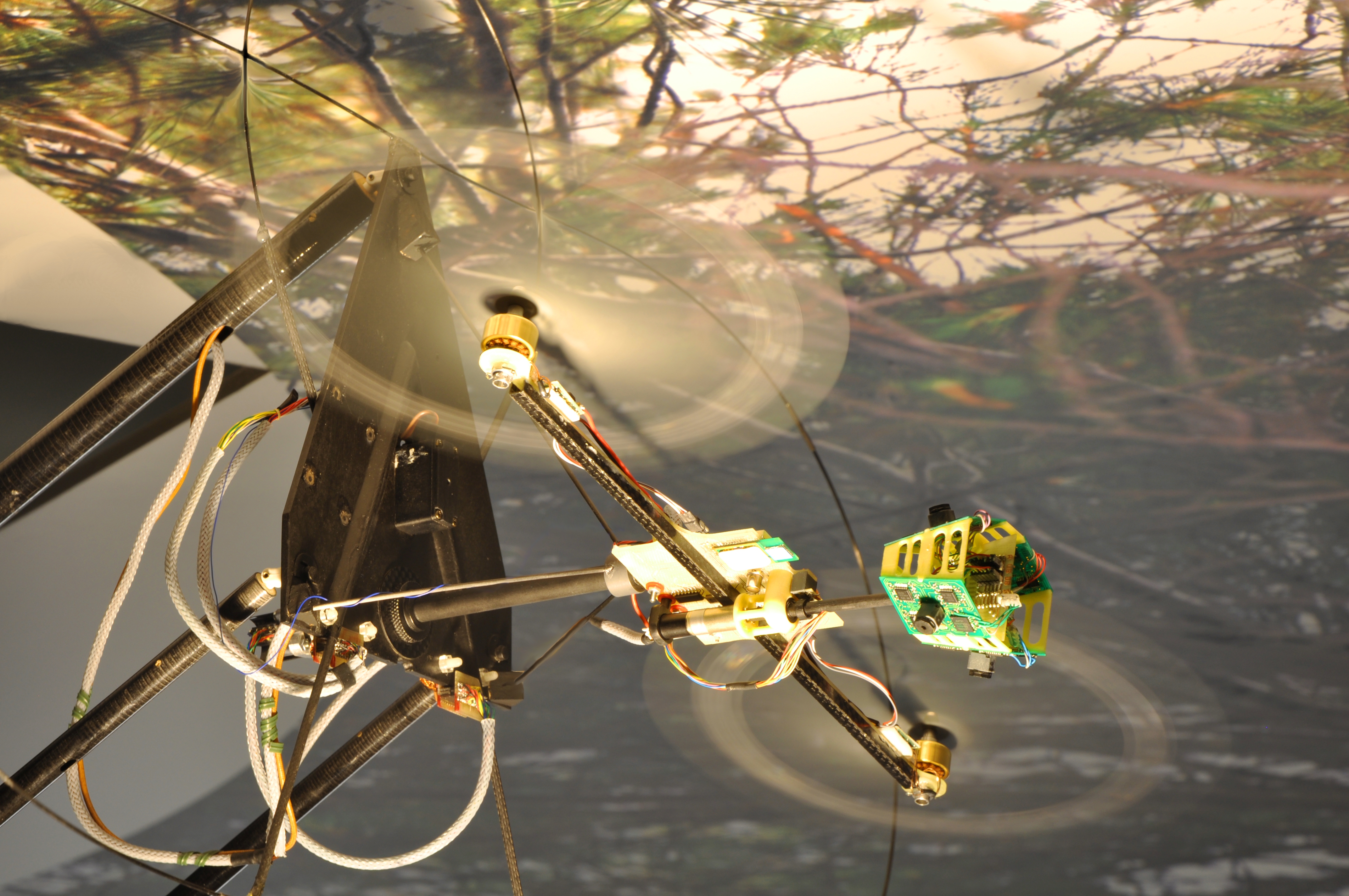
Voyons maintenant le cas de BeeRotor, un petit drone à double rotors.
Tout vaisseau utilise un cadre de référence pour maintenir son inertie. Chez les insectes, le moyen de contrôle de la stabilisation n’était pas clairement identifié.
Dans l’expérience réalisée, BeeRotor réalise un vol captif au-dessus d’une surface accidentée en anneau. Les flux optiques sont mesurés en ventral et en dorsal.
[…] L’article dans son intégralité est paru dans Planète Robots n°39 du 1er Mai 2016.